 |
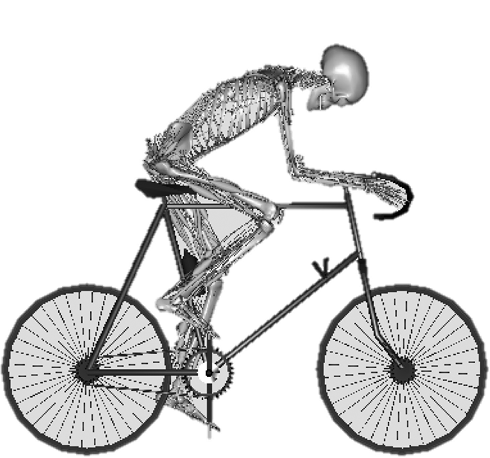
| Fig. 1.�@Bike model in the AnyBody AMMR �iAnyBody Technology A/S, Aalborg, Denmark�j. |
�F���q�����w Vol. 54, No. 2, 19-26, 2017
����
�h�R�ؓd�C�h����L����T�C�N�����O�^�����f���ɂ��_�f�ێ�ʃV�~�����[�V����
�c��@�P�F1�C�R�{�@����1�C��{�@���V1�C�����@���v1�C����@�g�N2�C�u�g�@���l1
1�v���đ�w
2���ۈ�Õ�����w
Simulation of Oxygen Uptake in a Cycling Exercise Model with Electrical Stimulation of Antagonist Muscles
Yoshihiko Tagawa1, Naosuke Yamamoto1, Masayuki Omoto1, Hiroo Matsuse1, Yoshio Takano2, Naoto Shiba1
1Kurume University
2International University of Health and Welfare
ABSTRACT
�@An environment with microgravity will cause disuse atrophy, resulting in loss of mass and strength in the muscles and bones.�@Exercise under extreme circumstances, such as microgravity, has been examined and moderate exercise intensity has been utilized in spaceflight programs.�@Conventional ergometer cycling is accepted as a safe exercise method and offers the added advantage of allowing ease of operation and control of exercise intensity.�@Although the effects of exercise on the human body have primarily been investigated using experimental approaches, advanced modeling and simulation techniques could be powerful tools to provide insights into the physical limitations, optimal conditions, and mechanisms that may lead to muscle and joint damage.�@The purpose of this study was to validate a cycling exercise model that includes a hybrid training system �iHTS�j for oxygen uptake compared with experimental results on Earth, and to suggest acceptable training conditions from case studies across a wide range of cycling parameters, including 0 g.�@HTS is a training method in which antagonist muscle activity is induced by electrical stimulation during movement.�@The cycling exercise model was obtained by modifying a commercially available bicycle model to simulate oxygen uptake during HTS cycling at 1 g and 0 g.�@Simulated oxygen uptake at 1 g showed good agreement with the experimental results described by Omoto et al �iJ. Nov. Physiother., 2013�j, suggesting a slight increase in oxygen uptake at 0 g over the simulation at 1 g.�@Optimal cycling conditions were also simulated to reduce the metabolic cost at 0 g under the two following constraints:using desired values of oxygen uptake as an index of exercise intensity, and knee-joint reaction force to maintain bone density.�@The validity of the cycling exercise model for oxygen uptake at 1 g was demonstrated by comparisons between simulated and experimental results.�@Simulated optimal cycling conditions showed that muscle co-contraction during HTS cycling exercise under microgravity, which decreases both pedal rate and mechanical load on the ergometer pedal, would offer an effective method to gain acceptable training conditions compared with experimental optimal conditions on Earth.
�iReceived:9 November, 2016�@Accepted:20 April, 2017�j
Key words:cycling, oxygen uptake, electrical stimulation, simulation, optimal cycling condition
I.�@�͂��߂�
�@�n�C�u���b�g�g���[�j���O�V�X�e���iHTS�j�͎��Ƌ��^����R�ɗ��p���郆�j�[�N�ȉ^���@�ł���B�g�̉^�����Ɋ߂̝h�R�ؑ��ɓd�C�h����^���C�U�������؎��k�͂��哮�̉^����R�Ƃ���l�����ł���26�j�B�哮�E�h�R�̗����������k���邽�ߍ����k�͂��C�ؗ͂⍜�̌��ʓI�ێ��E�������\�ł���B���Ƌ؎h������������V�X�e���̍\���͏��^�E�y�ʉ����\�ł���C��襂Ȋ��ł��L���ȉ^���@�ƂȂ�BHTS�𗘗p������A�̒n������ł́C�ؗ͂̈ێ��E�����C������̗}���Ɍ��ʂ��݂�ꂽ21�j�B
�@���݁C�����d�͉��ł̐g�̋@�\����ւ̑R�[�u�Ƃ��āC�F����s�m�́C�g���b�h�~���C���]�ԃG���S���[�^�C��R�^����Ȃǂ��g�p���C�T��6���ԁC1���������2���Ԃ̃g���[�j���O���s���Ă���B������14�j�́C���s��ISS�����]�ԉ^���Ɣ�r���C�g�̂̃G�l���M�[����Ɖ^�����Ԃ����������C�ő�_�f�ێ�ʒቺ��S�؈ޏk�̗\�h�Ɍ��ʂ̂��鎩�]�ԉ^���v���g�R�����l�Ă����B���̔w�i�ɂ́C�����؍ݎ��ɂ������s�m�̑̏d�����̖��C�^�����̃G�l���M�[����ʂ̑��傪�����炷�A�����̐H�Ɠ��ڗʑ����ƗA���R�X�g�̈����̖�肪����B�܂����́C���]�ԃG���S���[�^��p���āC�S����蕉�����ł̕��ϓ������ɒ������C�����I�ň��S�ȃG���S�^������24�j�⌌���R���g���[���ɓK�����^���Ö@�Ƃ��Ă̗L����25�j�������Ă���B���̂悤�ɒn�������d�͉����킸���]�ԃG���S���[�^���^���@��Ƃ��ė��p����Ă���B
�@�ŋ߁C���ۉF���X�e�[�V�����iISS�j�ɂď㎈HTS���؎������s��ꂽ12�j���C������Omoto��16�j�́C����HTS���]�ԃG���S���[�^�iHER�j��p�����T�C�N�����O�^���̒n����������{�����B�ނ�́CHER�̓K�ȉ^�����x�̐ݒ�̂��߂ɁC���ӃG���S���[�^�iVER�j��HER�ɂ��T�C�N�����O�^���̎_�f�ێ�ʂ̑���ƕ]�����s�����B
�@�����͑S�Ď������x�[�X�ɂ����l�Ă�]���ł��邪�C�������e�ɂ���Ă͎��{������ȏꍇ���z�肳���B�ߔN�̐i�������v�Z�@�V�~�����[�V�����Z�p�́C�����̎��O�]�����邢�͌v������ȓ������Ƃ��āC�g�̂̌��E��œK�ȏ����C��߂ɑ�����^���郁�J�j�Y���ɑ���m���Ȃǂ�ł���\��������B���̌����̖ړI�́C�K��HER�T�C�N�����O�^�����f���̍\�z����ђn��ł̎������ʂƂ̔�r���烂�f���̑Ó������m�F���C�����1 g�C0 g�ɂ������X�̃P�[�X�X�^�f�B����C�����O�Ɏ_�f�ێ�ʓ����̕]�����s���C����\�ȃg���[�j���O�������������邱�Ƃł���B
�@���̂��߁C�܂��؍��i�n��̓\�t�gAnyBody�iAnyBody Technology A/S, Aalborg, Denmark�j�̃��f�����|�W�g����Bike model�����ς���HER�T�C�N�����O�^�����f���ɂ��ďq�ׁC���ɃT�C�N�����O���̎_�f�ێ�ʂɂ��āC�n��ł̎������ʂƃV�~�����[�V�������ʂ��r���C���f���̑Ó����̌����s�����B����ɁC0 g���ŃT�C�N�����O�p�����[�^���L�͈͂ɕω������ċ��߂��_�f�ێ�ʓ�������CHER�T�C�N�����O��œK�T�C�N�����O�����̌������s�����B
II.�@���@
�@A.�@�T�C�N�����O�^�����f��
�@�V�~�����[�V�����c�[���Ƃ��āC�؍��i�n�^����̓\�t�gAnyBody ver.6.0.6��p�����B���̃\�t�g�ł̐l�̃��f���́C���B�̕��ϒj���i�g��1.76 m�C����75 kg�j����{�Ƃ��C200�ȏ�̍��C1,000�ȏ�̋�L���Ă���B��͂́C�^����^���ċؗ́C�ߔ��́C���[�����g�Ȃǂ��v�Z����t���͊w�ɂ�邪�C���p�ړI�ɉ����ă��f���\����I���ł���B
�@���]�ԃG���S���[�^�T�C�N�����O�^�����f���Ƃ��āCAnyBody AMMR�iAnyBody Managed Model Repository�j��BikeModel ��Full body model �iFig. 1�j����㎈���폜���� Lower leg model���f����p�����B�㎈�͉��肳��Ă��Ȃ����C�O�����狹���ɏ㎈�L�胂�f���Ɠ����p����ێ����邽�߂̓K�ȗ͂ƃ��[�����g���^�����Ă���B�Ҋ߂̈ʒu�́C�N�����N�����獂��0.78 m�C�����0.17 m�Ƃ����B
�@�؍��i�n�̋t���͊w�̌v�Z�ɕK�v�ȋ̓�����ɂ�MinMax1,18�j��Quadratic�p2�j���C���f���Ƃ��� Hill �^�C�v3�j��p�����B
�@
�@B.�@�h������
�@Omoto��16�j��HER�T�C�N�����O�^���ɂ����āC�d�C�h���i������`�g�̓d����������C�����g5 kHz�C�h�����g��40 Hz�̃o�[�X�g�g�j��80%�ő�ϗp�d���Ƃ��đ�ڎl���ƃn���X�g�����O�X�Ɉ�����C�y�_����]���x��60 rpm�Ƃ����B
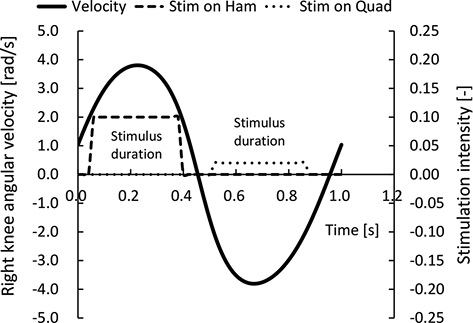
�@�T�C�N�����O�^�����f���ɂ��V�~�����[�V�����ł́C��ڎl���ƃn���X�g�����O�X�ɍő�ؔ����͂̂��銄���ɑ�������d�C�h����z�肵�CHTS����26�j�Ɋ�Â��؊�����h�R�ɗ^�����B�Ώۋ͕\�w���ɑ��݂���،Q�Ƃ����B�T�C�N�����O���̎h���^�C�~���O�́C�G���Ȋp�̑������x�ɉ�����on-off��ݒ肵���BFig. 2�͉E�r�̎h���^�C�~���O���������C�E�������ŏ�ʂɈʒu����Ƃ������Ԍ��_�Ƃ����B���r�͔��T�C�N���V�t�g�����p�^�[���ƂȂ�B�h����Ԃ́C60 rpm�ł̃y�_����]���x�|2.0 rad/s�ȉ��C2.0 rad/s�ȏ����ɂ��āC�e���x�ň��̊����ƂȂ�悤�ɂ����B
|
| Fig. 1.�@Bike model in the AnyBody AMMR �iAnyBody Technology A/S, Aalborg, Denmark�j. |
 |
|
| Fig. 2. | Stimulus duration during one rotation of the right leg at 60 rpm. Right knee antagonists during extension and flexion motions were stimulated for durations greater than 2.0 rad/s and less than �|2.0 rad/s, respectively.�@Ham:hamstring muscles, Quad:quadriceps femoris. |
III.�@�T�C�N�����O�^�����f���̑Ó���
�@�T�C�N�����O�^�����f���̑Ó�����]�����邽�߂Ɏ������ʂƔ�r�C�����s�����B�V�~�����[�V�����������COmoto��16�j�Ɠ��l�ɁC�y�_���̉�]���x��60 rpm�C�@�B�I���ׁi�T�C�N�����O�^���̒�R�ł����]���x�ƃN�����N�g���N�̐ρj��20�`100 W�i20 W���݁j�C�_�f�ێ�ʂ�P�ʐg�̎��ʂ�����̑��Ηʁi�mml/kg/min�n�j�Ƃ��ċ��߂��B
�@AnyBody�ł͋ؓ��̋@�B�I�p���[�����Ӄp���[11�j�����߂邱�Ƃ��ł���B��Ӄp���[����G�l���M�[��������߁C���Z���i1�j13�j����_�f�ێ�ʂ��v�Z�����B
�@�G�l���M�[����mkcal/kg/min�n= �_�f�ێ�ʁmml/kg/min�n �~ 0.005 kcal/ml�@�@�i1�j
�@�Ȃ��C���Î��̎_�f�ێ�ʁi3.5 ml/kg/min�j�́C�V�~�����[�V�������ʂƑ���l�Ƃ̔�r���s���ꍇ�ɂ̂݁C�l�������B���̌v�Z�l�͉^���݂̂ɂ��G�l���M�[����C�_�f�ێ�ʂł���B
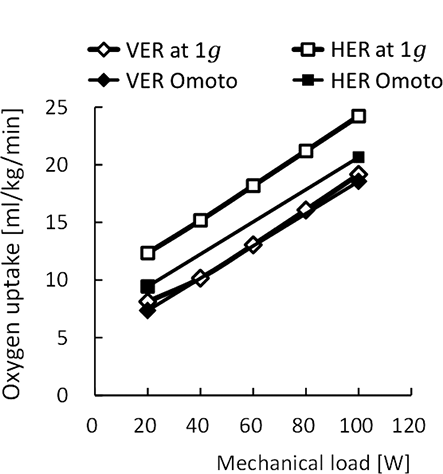
�@Fig. 3�́C�������N�����N�ւ̋@�B�I���� �mW�n�C�c�����_�f�ێ�ʁmml/kg/min�n�Ƃ��āC�����l�ƃV�~�����[�V�����l���r�������̂ł���B�d�C�h�����x�Ƃ��āC��ڎl���ł͍ő�ؔ����͂̊����i�؊����x�j��2%�C�n���X�g�����O�X�ł�10%������^�����B�V�~�����[�V�������ʂ́COmoto��16�j�̒n��ł̑���l��VER�T�C�N�����O��A�����iVER:�X��0.14�C�ؕ�4.56, HER:�X��0.14�C�ؕ�6.65�C������̐���l��p<0.0001�j�Ƃ悭��v�����BHER�ł́C�����ʂƂ��_�f�ێ�ʂ����ʑ������Ă��邱�Ƃ�������BHER�T�C�N�����O�^�����f���ł͑傫�߂̒l�ł��邪�C�^�����؊����x�̑傫���Ɉˑ������C�ƍl������B�V�~�����[�V�������ʂƎ������ʂ̔�r����C�T�C�N�����O�^�����f���͑Ó��ƍl������B�n��ł̏d��1 g����z�肵���V�~�����[�V�����l�������l�Ɨގ����邱�Ƃ����Ă���C0 g�ŋ��߂�_�f�ێ�ʂ��Ӌ`�����邾�낤�B
 |
|
| Fig. 3. | Comparison of experimental and simulation results of oxygen uptake between VER and HER on Earth at a pedal rate of 60 rpm. Values of oxygen uptake are expressed relative to unit body mass �iml/kg/min�j.�@VER:volitional cycle ergometer;HER:HTS �ihybrid training system�j with a cycle ergometer;g:acceleration due to gravity on Earth �i1 g is equal to 9.81 m/s2�j.�@Omoto:oxygen uptake data as published by Omoto et al16�j.�@�eMechanical load�f on the abscissa shows the resistance force acting on the pedal during cycling, defined as the product of crank torque and pedal rate. |
IV.�@�T�C�N�����O�^�����f���ɂ��_�f�ێ�ʓ���
�@A.�@�h�����x�̑����0 g�̑z��
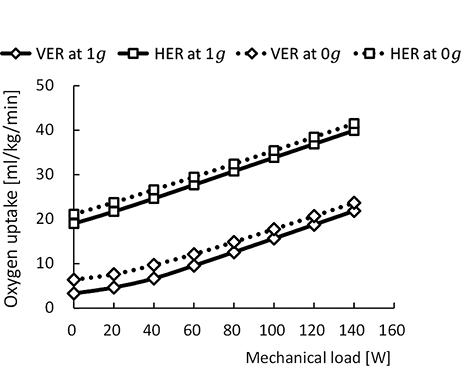
�@Fig. 4�́C��ڎl���ɋ؊����x10%�C�n���X�g�����O�X��20%�����̑��傳�����h�����x��^���C�@�B�I���ׂ�0�`140 W�Ƃ��ăV�~�����[�V�����������ʂł���B�y�_����]���x��III.�Ɠ��l��60 rpm�ł���B����Ƀv���O�����̏d�͉����x�p�����[�^�̐ݒ�ύX�ɂ��C0 g���z�肵�Čv�Z���s�����B�Ȃ��T�h���ʂ��\�����������Ȃ��悤�ɗ͊w�I�ȗv�f�Ō������Ă���B
�@�@�B�I���ׂ̑���ƂƂ��Ɏ_�f�ێ�ʂ͒����I�ɑ��������B�܂�Fig. 3�Ƃ̔�r����C���傫�Ȏh�����x�́C��葽���̎_�f�ێ�ʂ������I�ɑ��������邱�Ƃ��\�ł���B�����1 g�C0 g�ɋ��ʂ��Ă���C�h�����x�̐ݒ�l�ɂ��@�B�I���ׂ̑傫���ɊW�Ȃ��_�f�ێ�ʂ�e�Ղɐ���ł��邱�Ƃ��Ӗ�����B
�@B.�@��]���x�Ƌ@�B�I���ׂ�0 g VER�EHER�T�C�N�����O�^���ւ̉e��
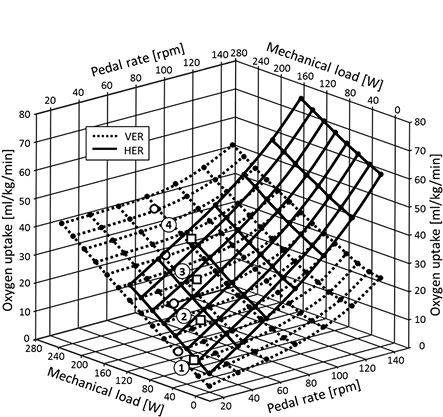
�@Fig. 5�́C�y�_���̉�]���x��20�`140 rpm�C�N�����N�ւ̋@�B�I���ׂ�0�`140 W �iHER���j�C 0�`260 W�iVER���j�ƕω��������C0 g�ł̃T�C�N�����O�^�����f���ɂ��_�f�ێ�ʂ̌v�Z�l�ł���B�j����VER�C������HER�ł���B�Ȃ�HER�̎h�����x�͑O��IV. A�Ɠ����ł���B
�@�_�f�ێ�ʂ́C�@�B�I���ׂ̑���ɑ��Đ��`�I�ɑ����邪�C��]���x�̏㏸�ɑ��Ă�2���Ȑ��I�ɑ��������B�Ȃ��}���́���VER�C����HER�̍œK�T�C�N�����O�������v���b�g�������̂ł���B�����͎���IV. C�ōs�Ȃ��B
�@C.�@�G�l���M�[����ጸ��0 g VER�EHER�T�C�N�����O�^���̍œK��
�@0 g VER�EHER�V�~�����[�V�����ɂ����āC�^�����x�̖ڈ��ƂȂ�_�f�ێ�ʂƍ��i�n�ێ��̂��߂̊ߔ��͂���]�l�ɋ߂Â��C���G�l���M�[�����ጸ����T�C�N�����O�^���̍œK�����l����B���̂��߂ɖړI���i2�j���`�����B�G�l���M�[����͎_�f�ێ�ʂƓ����ł���C�G�l���M�[����ጸ�͎_�f�ێ�ʂ̌������Ӗ�����B���̂��ߊ�]����^�����x�Ƃ��Ď_�f�ێ�ʂ�%�ő�_�f�ێ�ʑ����l��ݒ肵�C���̋ߖT�ł̃G�l���M�[����̒ጸ��z�肷��B�܂��G�ߔ��͂Ɋ�]�l��݂����B���Ȃ킿�C�ړI���i2�j���ŏ�������œK�T�C�N�����O���������߂��B
�@�ړI��
�@w1 �i�_�f�ێ�ʁ| a�j2 + w2 �i�G�ߔ���/�̏d�|b�j2 + w3�G�l���M�[����@�@�i2�j
�@a:%�ő�_�f�ێ�ʑ����l�i��]�l�j�Cb:���K�����ꂽ�G�ߔ��́i��]�l�j�Cw1, w2, w3:�d�W��
�@0 g VER�EHER�̍œK�T�C�N�����O�����Ǝ����l��Table 1�ɂ܂Ƃ߂��B�h�R�؎h�����x�ɑ�������؊����x��Fig. 4�Ɠ��l�ɑ�ڎl����10%�C�n���X�g�����O�X��20%�Ƃ����B�ړI���̍ŏ����ɂ������������G�l���M�[����̒ጸ�ʂ��l�����āC�d�W�������s����I�Ɍ��߂��Bw1= w2 = 40�Cw3 = 1�Ƃ����ꍇ�C�_�f�ێ��10, 20, 30, 40 ml/kg/min�C�G�ߔ��� 3�m�|�n�̊e��]�l�̂��Ƃł̍œK�ȃT�C�N�����O�����i��]���x�mrpm�n�C�@�B�I���ׁmW�n�j�́CVER�Łi20.4, 56.6�j�C�i41.8, 118�j�C�i61.1, 180�j�C�i77.2, 241�j�CHER�� �i18.4, 24.3�j�C�i34.7, 53.8�j�C�i47.6, 91.4�j�C�i59.3, 132�j�ƂȂ����BHER�ł͉�]���x���������Ȃ�C�@�B�I���ׂ��������Ă���B�܂��œK�������ɂ���������l���C�G�l���M�[����ɂ�����VER�CHER�Ƃ���256, 520, 785, 1,050 J/s�C�_�f�ێ�ʂɂ����Ċ�]�l��菬���Ȓl�ƂȂ����B�G�ߔ��͂́CVER�ł͊�]�l�ƈ�v�������CHER�ł͉^�����x�������ɏ]����]�l�Ƃ̍����傫���Ȃ����B�ړI���ł̃G�l���M�[����̗L���C���Ȃ킿�C�d�W��w3 = 1�ł͎_�f�ێ�ʂ̎����l����]�l��菬�����Ȃ邱�ƂŃG�l���M�[����ጸ���Cw3 = 0�ł͎_�f�ێ�ʂ���]�l�ƈ�v�����B�Ȃ�Fig. 5�ɁC�d�W����w1 = w2 = 40, w3 = 0�Ƃ����œK�T�C�N�����O�������v���b�g�i��:VER�C��:HER�j�����B�@�`�C ��4��ނ̎_�f�ێ�ʂ̊�]�l10, 20, 30, 40 ml/kg/min�ɂ��ꂼ��Ή�����B
 |
|
| Fig. 4. | Effects of differences in gravity and stimulus intensity on oxygen uptake during VER and HER at a pedal rate of 60 rpm. Values of oxygen uptake are expressed relative to unit body mass �iml/kg/min�j.�@VER:volitional cycle ergometer;HER:HTS �ihybrid training system�j with a cycle ergometer;g:acceleration of gravity on Earth �i1 g and 0 g are 9.81 and 0 m/s2, respectively�j.�@�eMechanical load�f on the abscissa shows the resistance force acting on the pedal during cycling, defined as the product of crank torque and pedal rate. |
 |
|
| Fig. 5. | Effects of different combinations of pedal rate and mechanical load on oxygen uptake during VER �idashed line�j and HER �isolid line�j at 0 g. Values of oxygen uptake are expressed relative to unit body mass �iml/kg/min�j.�@VER:volitional cycle ergometer;HER:HTS �ihybrid training system�j with a cycle ergometer. 0 g:a zero acceleration of gravity, 0 m/s2.�@�� and �� show the optimal conditions of pedal rate and mechanical load for VER and HER, respectively, with conditions obtained to minimize the equation of objective function �i2�j, excluding the energy expenditure term.�@Numbers 1 to 4 correspond to a = 10 to 40 ml/kg/min as desired values for oxygen uptake in Table 1. |
| Table 1.�@Optimal cycling conditions and reduction of energy expenditure for VER and HER at 0 g, considering oxygen uptake and reaction force. | ||||||||
| Optimal conditions | Realized values | Weight coefficients |
||||||
| Pedal rate �mrpm�n |
Mechanical load �mW�n |
Energy expenditure �mJ/s�n |
Oxygen uptake �mml/kg/min�n |
Reaction force at knee joint �m�|�n |
w1:w2:w3 | |||
| VER | 20.4 | 56.6 | 256 | 9.67 | for a =10 | 3.00 | for b =3 | 40:40:1 |
| 21.1 | 58.6 | 265 | 10.0 | 3.00 | 40:40:0 | |||
| HER | 18.4 | 24.3 | 256 | 9.67 | for a =10 | 3.01 | for b = 3 | 40:40:1 |
| 19.0 | 25.2 | 265 | 10.0 | 3.01 | 40:40:0 | |||
| VER | 41.8 | 118 | 520 | 19.7 | for a = 20 | 3.00 | for b = 3 | 40:40:1 |
| 42.5 | 120 | 529 | 20.0 | 3.00 | 40:40:0 | |||
| HER | 34.7 | 53.8 | 520 | 19.7 | for a = 20 | 3.18 | for b = 3 | 40:40:1 |
| 35.2 | 54.9 | 529 | 20.0 | 3.18 | 40:40:0 | |||
| VER | 61.1 | 180 | 785 | 29.7 | for a = 30 | 3.00 | for b = 3 | 40:40:1 |
| 61.7 | 182 | 794 | 30.0 | 3.00 | 40:40:0 | |||
| HER | 47.6 | 91.4 | 785 | 29.7 | for a = 30 | 3.30 | for b = 3 | 40:40:1 |
| 48.0 | 92.7 | 794 | 30.0 | 3.30 | 40:40:0 | |||
| VER | 77.2 | 241 | 1,050 | 39.7 | for a = 40 | 3.00 | for b = 3 | 40:40:1 |
| 77.7 | 243 | 1,058 | 40.0 | 3.00 | 40:40:0 | |||
| HER | 59.3 | 132 | 1,050 | 39.7 | for a = 40 | 3.40 | for b = 3 | 40:40:1 |
| 59.6 | 133 | 1,058 | 40.0 | 3.40 | 40:40:0 | |||
|
Values of oxygen uptake are expressed relative to unit body mass �iml/kg/min�j. a:desired values of oxygen uptake, 10, 20, 30, and 40 ml/kg/min;b:a desired value of knee joint reaction force normalized by body weight, 3 �m�|�n;VER:volitional cycle ergometer;HER:HTS �ihybrid training system�j with a cycle ergometer. |
||||||||
V.�@�l�@
�@�ߍ��ȋɌ����ɂ����āC�M���������ړI�Ƃ����������J��Ԃ����{���邱�Ƃ͍���ł��낤�B�V�~�����[�V�����̗��_�́C�����ł͍s���Ȃ��悤�ȏ������������邱�Ƃ��\�ł���C��X�̃P�[�X�����s�ł��邱�Ƃɂ���B���̂悤�Ȏ��s���J��Ԃ��C����ړI�ɓK�����������ʓI�ɒ��邱�Ƃ��\�ł���B�������C���ʂ̉��߂ɓ������ẮC���f�����O���k������t�^����������l������K�v������C�萫�I�ȒɎ~�܂邱�Ƃ�����B����Ɏ����ɂ�鑪��l�Ƃ̔�r�E���́C���f���̑Ó����f�����ŕs���ł���B
�@���]�ԃG���S���[�^��p�����T�C�N�����O�����Ɠ���̏������C�؍��i�n���f���ɂ��T�C�N�����O�ɓK�p�����B�_�f�ێ�ʂ��r�����Ƃ���C�悭�ގ��������ʂƂȂ����iFig. 3�j�B���̎��������Ă���C0 g�ŋ��߂�_�f�ێ�ʂ��Ӗ�������ƍl������B���25�j�CHansen��10�j�́C�y�_����]���x�����ł���Ƃ��C�_�f�ێ�ʂ̑����͋@�B�I���חʂ̑���Ɛ��`�ȊW�ɂ���Əq�ׂĂ��邪�CFig. 3�����l�̌��ʂł������BFig. 3��HER�����ł͍ő�ϗp�d����80%���h�����x�Ƃ������C�V�~�����[�V�����ɂ����Ă͑�ڎl���ōő�ؔ����͂�2%�C�n���X�g�����O�X�œ�10%�̊����Ōv�Z�����B80%�ő�ϗp�d��HTS�̕G�ߋ؎��k�͍͂ő�ؔ����͂�20%��ł���15�j�B
�@HTS�ł͔畆�\�ʂ���ړI�̋�d�C�h������B�畆�\�ʂ���̎h���_�́C�畆�\�ʂɓ\�t�����d�ɂ���^���_�o�܂ł̃C���s�[�_���X��_�o�����}�̑傫���ƌ`�Ԋw�I�Ȕz���̉e�����C�t�T�C�Y�̌��������藧�����͏��Ȃ�6�j�B�܂��C�����^���_�o���ؕ��ɐN�������U�w�I�ȉ^���_�imotor entry point�j9�j�Ƃ͕K��������v���Ȃ�8,9�j�B���̂��߃��[�U�}�j���A���Ȃǂŋ�������U�}���Q�l�ɂ����h���d�ɂ̓\�t�́C��ѐ��̂Ȃ��؏o�́C�s�����C�܂��L�Q�������N����\��������9�j�B����ɁC�d�C�h���ɓK�����h���_�͌l��������4�j�B���̂��߁C�\�ʓd�C�h���ł͋؎��k�͂��ǍD�ɓ�������ʓI�Ȏh���̈��O�O�ɒT��9,23�j���C�̈���d�ɂ�\�t���邱�Ƃ��d�v�ł���B���̂悤�ȓ_�ɗ��ӂ��ĂȂ��ꂽ���̂ւ̓d�C�h���́C�V�~�����[�V�����ɂ�����Ώۋ��S�̓I�Ɋ������闝�z�I�ȏ�ԂƂ͈قȂ�B���̂��߃V�~�����[�V�����ł́C�Ώۋ��ኈ�����x���ł��C�����ȏ�̌��ʂ������炵�Ă���ƍl������B
�@HTS�́C�h�R�؊������哮�̉^����R�Ƃ��铯�����k�`�Ԃł���C��{�I�ɓ����G�l���M�[�����U������BHTS�̝h�R�ւ̓d�C�h�����x���K�ʂȔ͈͓��ł́C�ؓ������������k���͋،Q�̍ŏ���J�5�j�Ɋ�Â��������Ď哮�E�h�R�ؗ͂��o�����X���Ă���C�V�~�����[�V�����ɂ����l�̋@�����K�p����Ă���1,18�j�BFig. 4�ł�0 g VER�EHER�T�C�N�����O�̎_�f�ێ�ʂ�1 g�̏ꍇ�Ɣ�ה��������B����͒n��ł̃T�C�N�����O�ɂ����āC�d�͂��y�_���������ɂ͓����͂̃A�V�X�g�ƂȂ�C�y�_���㏸���ɂ͐����͂Ƃ��č�p���邽�߂ł���B0 g �ɂ����āC1 g�Ɠ��l�̋@�B�I���ׂ̉��œ�����]���x���������悤�Ƃ���C�A�V�X�g�͂Ɛ����͂̍�p���ؗ͂ɂđ㏞����K�v������C�_�f�ێ�ʂ����債���ƍl������B�܂�Fig. 4�̃V�~�����[�V�����ɂ��C��]���x�����̂Ƃ��C���ۂ̔����d�͉��ɂ����Ă����l�̐��`�������\�z����C1 g�C0 g�ɂ�����炸�CHTS�́C�����蕝�Ŏ_�f�ێ�ʂ������悭���������邱�Ƃ����҂����B
�@Fig. 5��0 g���ŋ@�B�I���ׂƉ�]���x��ω��������ꍇ�̎_�f�ێ�ʂ������Ă���D�_�f�ێ�ʂ́CFig. 4���l�ɋ@�B�I���ב����ɑ��Đ��`�I�ɑ��������C��]���x�ɑ��Ă�2���Ȑ���ɑ��������BVER�ł͊ɂ₩�CHER�ł͌����ȑ������������B1 g�̏ꍇ���قƂ�Ǔ������ʂł���B����22�j�́C�O���Ɏd�������Ȃ��@�B�I����0 W�̃T�C�N�����O�^�������{���C�_�f�ێ�ʂƃy�_����]���x�̊W��2���Ȑ��ƂȂ邱�Ƃ��������B�܂�80 rpm�ȏ�ł̑����͌����ł������C�ƕ��Ă��邪�C�V�~�����[�V�������ʂł�80 rpm�ߖT���瓯�l�̌X�����������BFoss��7�j��0 W�ȏ�ł̎_�f�ێ�ʂƃy�_����]���x�̊W�ׁC350 W�̋@�B�I���ׂł͎_�f�ێ�ʂ�80 rpm��U����̑�����F�߂Ă���BFig. 5�̉�]���x-�_�f�ێ�ʂ�5 rpm���݂ōČv�Z���ĕω��_�ichange point, CP�j�����߂��iJMP 9���ϗʊǗ��}�CSAS Institute Inc.�C�č��j�B�e�@�B�I���ׂł̕ω��_�ς����Ƃ���VER�CHER�Ƃ��ɖ�70 rpm�ł���C���80 rpm�ɋ߂��l�ƂȂ����B���}�̋Ȑ��́C1��������̊��Z�ʂł���_�f�ێ�ʂ̒l�ɉ�]���x��������悶�����`�����ƁC�ω��_�ߖT����̔���`���������Z���ꂽ2��������Ȃ�B�����Ɠ��l�ɁC�V�~�����[�V�����ɂ��_�f�ێ�ʂƃy�_����]���x�̊W��2���Ȑ���ɂȂ�@���̌����́C����̉ۑ�Ƃ������B
�@�^�����x�⍜���k�̖͂ڈ��Ƃ��āC�_�f�ێ�ʂƕG�ߔ��͂������]�l������悤�ɁC�œK�T�C�N�����O���������߂��iTable 1�j�B�_�f�ێ�ʂ͓��{�l�i��N�j���j�̎��]�ԃG���S���[�^�T�C�N�����O���̍ő�_�f�ێ�ʊ�敽��20�j��25, 50, 75, 100%�����C�G�ߔ��͕͂��s�����ŋ��߂�ꂽ����l17�j�̑傫�߂̒l�ł���̏d��3�{�Ƃ����BSeabury��19�j�̒n��VER�T�C�N�����O�ɂ�����G�ߔ��͂̑傫���͕s���ł��邪�C���{�l�̍ő�_�f�ێ�ʊ�敽�ς�100%�����i�_�f�ێ��40 ml/kg/min�j�ɑ���ނ�̍œK�ȃT�C�N�����O�����͖�60 rpm�C245 W�ƂȂ��Ă���B0 g VER�T�C�N�����O�^�����f���ɂ��œK����77.2 rpm�C241 W�́CFig. 4����1 g�C0 g�̎_�f�ێ�ʂ̍��ق͔����Ƃ���C1 g�����l�Ƒ卷�͂Ȃ��ƍl������BHER�T�C�N�����O�ł́CHTS�ɂ��h�R�̉��S���؎��k�͂Ƃ荇�����߂̎哮�̋؎��k�͑��傪���߂��C���ʂƂ��Ċߔ��͂�_�f�ێ�ʂ���������B�����]�l�ɑ��āC�V�~�����[�V����HER�̏ꍇ�C��]���x���x���Ȃ�C�@�B�I���ׂ͔������Ă���B���Ȃ킿HER�́C�哮�ɑ傫�ȋ؎��k�͂������炷���߁C������]�_�f�ێ�ʂɂ����āCVER�̉�]���x���ᑬ��ł̃T�C�N�����O���]�܂����B�ᑬ���͋؎��k�͂̑����𑣂����߁C�ߔ��͂̎����l�͊�]�l���傫�߂Ȓl�ƂȂ��Ă���B�܂��CHTS�̋ؓ������k���C�O�I�ȋ@�B�I���ׂɂ��_�f�ێ�ʂ�㏞���CHER�T�C�N�����O�ł̋@�B�I���ׂ��������B���������X���́C�G���S���[�^�ɂ��^�����x�ݒ���@�ɗZ�ʐ���^���C�^�p��̗��_�ƍl������B
�@������14�j�̌����̎�|�́C�F�����ɂ����ĐS�@�\���ێ����G�l���M�[�����ጸ�����邱�Ƃł���B���̎�|�܂��C�^�����x�̖ڈ��ƂȂ�_�f�ێ�ʂƋ؍��i�n�ޏk��̂��߂̊ߔ��͂Ɋ�]�l��݂��C�����ɃG�l���M�[����̒ጸ����������œK����@�����������B�ړI���i2�j���ŏ��Ƃ���œK���ɂ����āC�G�l���M�[����̒lj��C���Ȃ킿�d�W����w3 > 0�Ƃ��邱�ƂŁC�_�f�ێ�ʂ̎����l����]�l��菬�������G�l���M�[����̒ጸ��}�邱�Ƃ��\�ł���Bw3 = 0�ł͎_�f�ێ�ʂ���]�l�ƈ�v�����邱�Ƃ��ł���B������Table 1�ł̒l�͖ړI���i2�j�Ɋ�Â����̂ł���C�G�l���M�[����̒ጸ�ʂ̓K�p�ɓ������ẮC�d�W���̎��s����I�Ȓ������K�v�ł���B
VI.�@�܂Ƃ�
�@�؍��i�n�̌v�Z�@���f���ɁC���]�ԃG���S���[�^�T�C�N�����O���̑�ڎl���ƃn���X�g�����O�X�ɓd�C�h�������̋؊����������C�_�f�ێ�ʂ̃V�~�����[�V���������{�����B�n��ł̑���l�Ƃ悭��v���錋�ʂ������CHTS�p����T�C�N�����O�^�����f���̑Ó����������ꂽ�B����ɂ������̎��O�̗\����]�����\�ƂȂ�B���������f���ł̋؊����͗��z�I�Ȃ��̂ł���C���ۂ̕\�ʓd�C�h���Ƃ̎h�����x�ƑΔ䂷��ۂɂ͗��ӂ��K�v�ł���B
�@���f����͂ł̓p�����[�^�̕ύX���e�Ղł���C�d�͂�h�����x�C�@�B�I���ׂȂǂ�ύX�����V�~�����[�V�������ʂ���C�_�f�ێ�ʂ̒����ɂ͎h�����x�̕ύX�����ʓI�ł��邱�Ƃ��������ꂽ�B����ɁC��]����_�f�ێ�ʂƊߔ��͂̎����ɍœK����@���L���ł���C�ړI���̏d�W���̐ݒ�ŁC�^�����x�����郌�x���Ɉێ����G�l���M�[������ǂ̒��x�ጸ�ł��邩�C���������B
�@�s�������p�p�̌y����h�~�̊ϓ_����C�^�����x�Ɋߔ��͂�G�l���M�[��������������œK�T�C�N�����O�^�������̒�Ă͎a�V�ƍl������B�h�R�ؓd�C�h���T�C�N�����O�^�����f���ɂ��1 g���̎_�f�ێ�ʂ̃V�~�����[�V�������ʂ͎������ʂƂ悭��v���C���f���̑Ó������m�F���ꂽ�B�܂��C���]����_�f�ێ�ʂ���ѕG�ߔ��͂̂��Ƃł�0 g VER�EHER�T�C�N�����O�̍œK�����̔�r����CHTS���y�_���̉�]���x�Ƌ@�B�I���ׂ����������C����\�ȃg���[�j���O������̂Ɍ��ʓI���@�ł��邱�Ƃ��������B
�ӎ�
�@�{�����̈ꕔ�́CJSPS�Ȍ���JP26506014�̏����ɂ���čs��ꂽ�B�L���Ďӈӂ�\����B
����
| 1�j | AnyBody Tutorials, Inverse Dynamics of Muscle Systems, Lesson 5:Min/Max Muscle Recruitment, The AnyBody Modeling System version 6.0.6, AnyBody Technology A/S, Denmark, 2016. |
| 2�j | AnyBody Tutorials, Inverse Dynamics of Muscle Systems, Lesson 6:Composite Recruitment Criteria, The AnyBody Modeling System version 6.0.6, AnyBody Technology A/S, Denmark, 2016. |
| 3�j | AnyBody Tutorials, Muscle modeling, Lesson 5:Muscle Models, The AnyBody Modeling System version 6.0.6, AnyBody Technology A/S, Denmark, 2016. |
| 4�j | Bottor, A., Oprandi, G., Lanfranco, F., Allasia, S., Mafficuletti, N.A., and Minetto, M.A.:Atlas of the muscle motor points for the lower limb:implications for electrical stimulation procedures and electrode positioning, Eur. J. Appl. Physiol., 111, 2461-2471, 2011. |
| 5�j | Dul, J., Johnson, G.E., Shiavi, R., and Townsend, M.A.:Muscular synergism-II.�@A minimum-fatigue criterion for load sharing between synergistic muscles, J. Biomech., 17, 675-684, 1984. |
| 6�j | Feiereisen, P., Duchateau, J., and Hainaut, K.:Motor unit recruitment order during voluntary and electrically induced contractions in the tibialis anterior, Exp. Brain Res., 114, 117-123, 1997. |
| 7�j | Foss, O. and Hallen, J.:The most economical cadence increases with increasing workload, Eur. J. Appl. Physiol., 92, 443-451, 2004. |
| 8�j | Gobbo, M., Gaffurini, P., Bissolotti, L., Esposito, F., and Orizio, C.:Transcutaneous neuromuscular electrical stimulation:influence of electrode positioning and stimulus amplitude setting on muscle response, Eur. J. Appl. Physiol., 111, 2451-2459, 2011. |
| 9�j | Gobbo, M., Mafficuletti, N.A., Orizio, C., and Minetto, M.A.:Muscle motor point identification is essential for optimizing neuromuscular electrical stimulation use, J. NeuroEng. Rehabil., 11, 6 pages, 2014. |
| 10�j | Hansen, J.E., Casaburi, R., Cooper, D.M., and Wasserman, K:Oxygen uptake as related work rate increment during cycle ergometer exercise, Eur. J. Appl. Physiol. Occup. Physiol., 57, 140-145, 1988. |
| 11�j | Holmberg, L.J., Ohlsson, M.L., Supej, M., and Holmberg, H.C.:Skiing efficiency versus performance in double-poling ergometry, Comput. Methods Biomech. Biomed. Engin., 16, 987-992, 2013. |
| 12�j | Hybrid Training, �ŏI�X�V��2015�N4��17���@http://iss.jaxa.jp/kiboexp/theme/lifeintao2009/hybrid_training/index.html�i�{�� 2016�N2��25���j |
| 13�j | Mahabir, S., Bacer, D.J., Giffen, C., Clevidence, B.A., Campbell, W.S., Taylar, P.R., and Hartman, T.:Comparison of energy expenditure estimates from 4 physical activity questionnaires with doubly labeled water estimates in postmenopausal women, Am. J. Clin. Nutr., 84, 230-236, 2006. |
| 14�j | �����m���C�c����㎟�C�R�c�@�[�C�哇�@���C�����H:�F�����ł�VO2max�ቺ��}�����邽�߂̉^���v���O�����C�}�g��w�̈�w�I�v�C36, 93-103, 2013. |
| 15�j | ���c �V�C�O�c�M�i�C�u�g���l�C����g�N�C�c��P�F:�G���L�^���ɂ�����n�C�u���b�h�P���@�^�����ׂ̌����C��E�R�X�|������C18, 33-38, 2006. |
| 16�j | Omoto, M., Matsuse, H., Takano, Y., Yamada, S., Ohshima, H., Tagawa, Y., and Shiba, N.:Oxygen uptake during aerobic cycling exercise simultaneously combined with neuromuscular electrical stimulation of antagonists, J. Nov. Physiother., 3, 185-191, 2013. |
| 17�j | Ortholand Loading of Orthopaedic Implants, 2015. http://www.orthoload.com/�iaccessed 2016-2-25�j. |
| 18�j | Rasmussen, J., Damsgaard, M., and Voigt, M.:Muscle recruitment by the min/max criterion�\a comparative numerical study, J. Biomech., 34, 409-415, 2001. |
| 19�j | Seabury, J.J., Adams, W.C., and Ramey, M.R.:Influence of pedaling rate and power output on energy expenditure during bicycle ergometer, Ergonomics, 20, 491-498, 1977. |
| 20�j | ��ؐ��o;���{�l�̌��N�֘A�̗͎w�W�ő�_�f�ێ�ʊ�您��і]�܂������x���C�̗͉Ȋw�C58, 5-6, 2009�D |
| 21�j | �c��P�F�C�V�c�v��C���R�q�V�C�������v�C�u�g���l:ISS���g�p��z�肵���d�C�h���n�C�u���b�h�g���[�j���O�V�X�e���C�o�C�I���J�j�Y��22�C�c��`�m��w�o�ʼn�C�����Cpp. 225-236, 2014. |
| 22�j | ������l:���I�p���[�����ɒ��ڂ����̋@�B�I�����̉�́C���m�w�ʘ_���C��B�H�Ƒ�w��w�@�����̍H�w�����ȁC2008. |
| 23�j | Watanabe, T., Tagawa, Y., Nagasue, E., and Shiba, N.: Surface electrical stimulation to realize task oriented hand motion, Proc. of the 31st Annual Int�fl Conf. of the IEEE EMBS, 662-665, Sep. 2-6, Minneapolis, Minnesota, USA, 2009. |
| 24�j | ��L���C���䐳���C�v�ۗT��C���c�K���C���c�T��:���]�ԃG���S���[�^�ɂ�����y�_���̉�]���̈Ⴂ�����̂ɋy�ڂ��e�����S����蕉�ׂɂ�錟�����C���w�Ö@�Ȋw�C22, 215-218, 2007. |
| 25�j | ��L���C���c�T��:���]�ԃG���S���[�^�ɂ���]���̈Ⴂ�����̂̎_�f�����n�Ƒ�ӎ��v�n�֗^����e���C���w�Ö@�Ȋw�C24, 617-624, 2009. |
| 26�j | Yanagi, T., Shiba, N., Maeda, T., Iwasa, K., Umezu, Y., Tagawa, Y., Matsuo, S., Yamamoto, T., Nagata, K., and Basford, J.R.:Agonist contractions against electrically stimulated antagonists, Arch. Phys. Med. Rehabil., 84, 843-848, 2003. |
�A����F��839-0863�@�������v���Ďs������155-1
�@�@�@�@�v���đ�w��ÃZ���^�[�@���n�r���e�[�V�����Z���^�[
�@�@�@�@�c��@�P�F
�@�@�@�@TEL:0942�i22�j6721�i����421�j
�@�@�@�@FAX:0942�i27�j6087
�@�@�@�@E-mail:tagawa_yoshihiko@kurume-u.ac.jp